![]()
![]()
Studenci kierunku Robotyzacja Procesów Wytwóczych realizują liczne projekty inżnierskie, które prowadzone są ramach regularnych zajęć dydaktycznych (przykładowo na przedmiotach "Robotyzacja Procesu Technologicznego" czy "Projekt Inżnierski"), a także w ramach działalności Studenckiego Koła Naukowego. Więcej informacji nt. działaności Koła znajduje się w zakładce "Koło Naukowe".
Wśród wielu opracowanych do tej pory projektów warto wymienić:
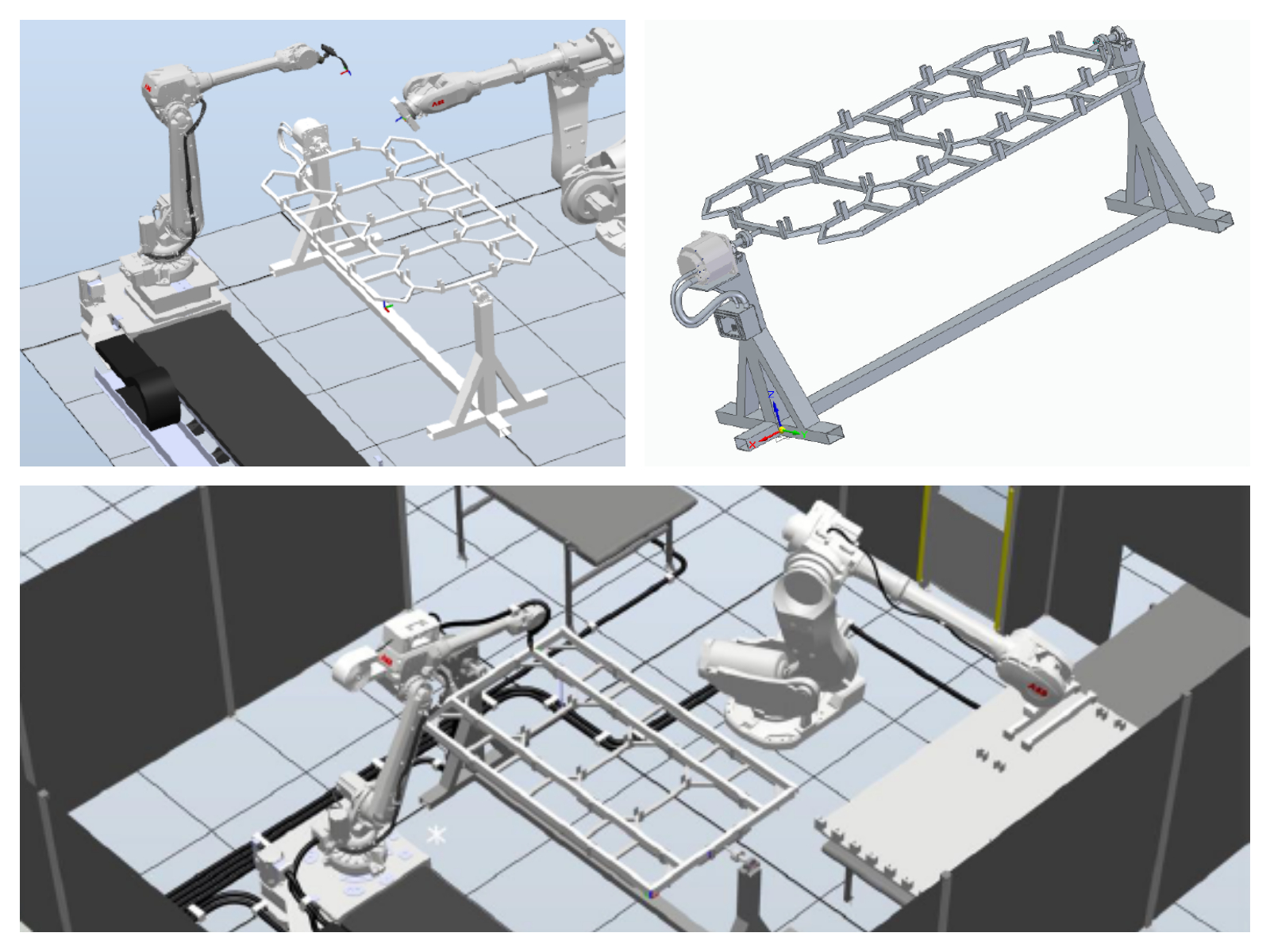
Tytuł projektu: „Projekt zrobotyzowanego gniazda spawania ramy przyczepki samochodowej”.
Cel: Celem zrealizowanych prac było opracowanie projektu zrobotyzowanego stanowiska spawalniczego wysposażonego w dwa roboty wspołpracujące - robota transportowego układającego profile na stole spawalniczym, a także robota spawalnciznego odpowiadającego za łączenie elementów kontrukcji.
Zespół projektowy: Paweł Bukowiński, Mateusz Grabowski, Grzegorz Dmowski
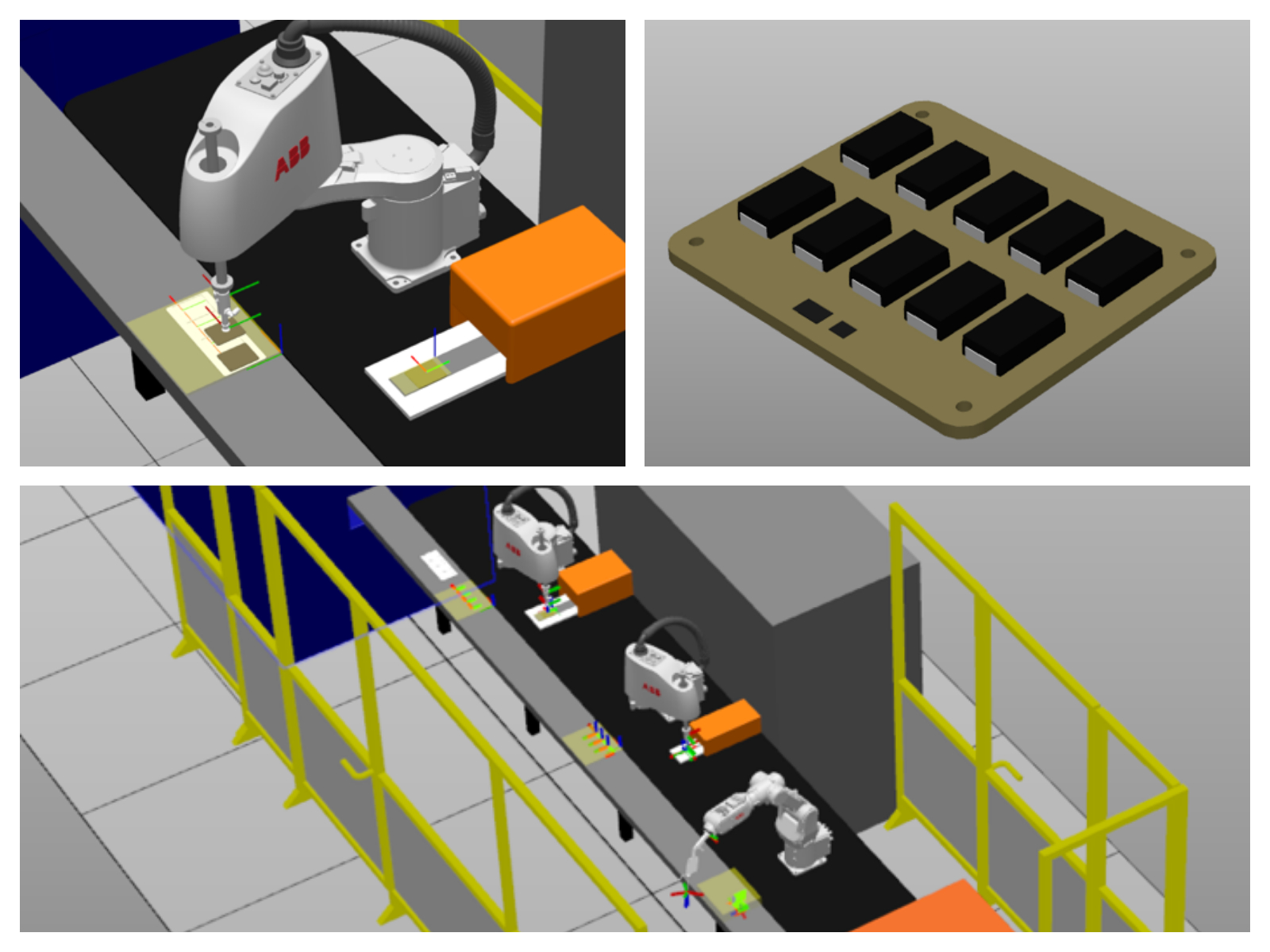
Tytuł projektu: „Robotyzacja procesu lutowania płytek PCB”.
Cel: Celem zrealizowanych prac było opracowanie projektu zrobotyzowanej linii łączenia elementów na płytce PCB wyposażonej w roboty przemysłowe o różnorodnej konstukcji - przegubowe oraz SCARA.
Zespół projektowy: Jan Bukała, Beata Furtak, Szymon Gruszczyk, Karol Krzysiak
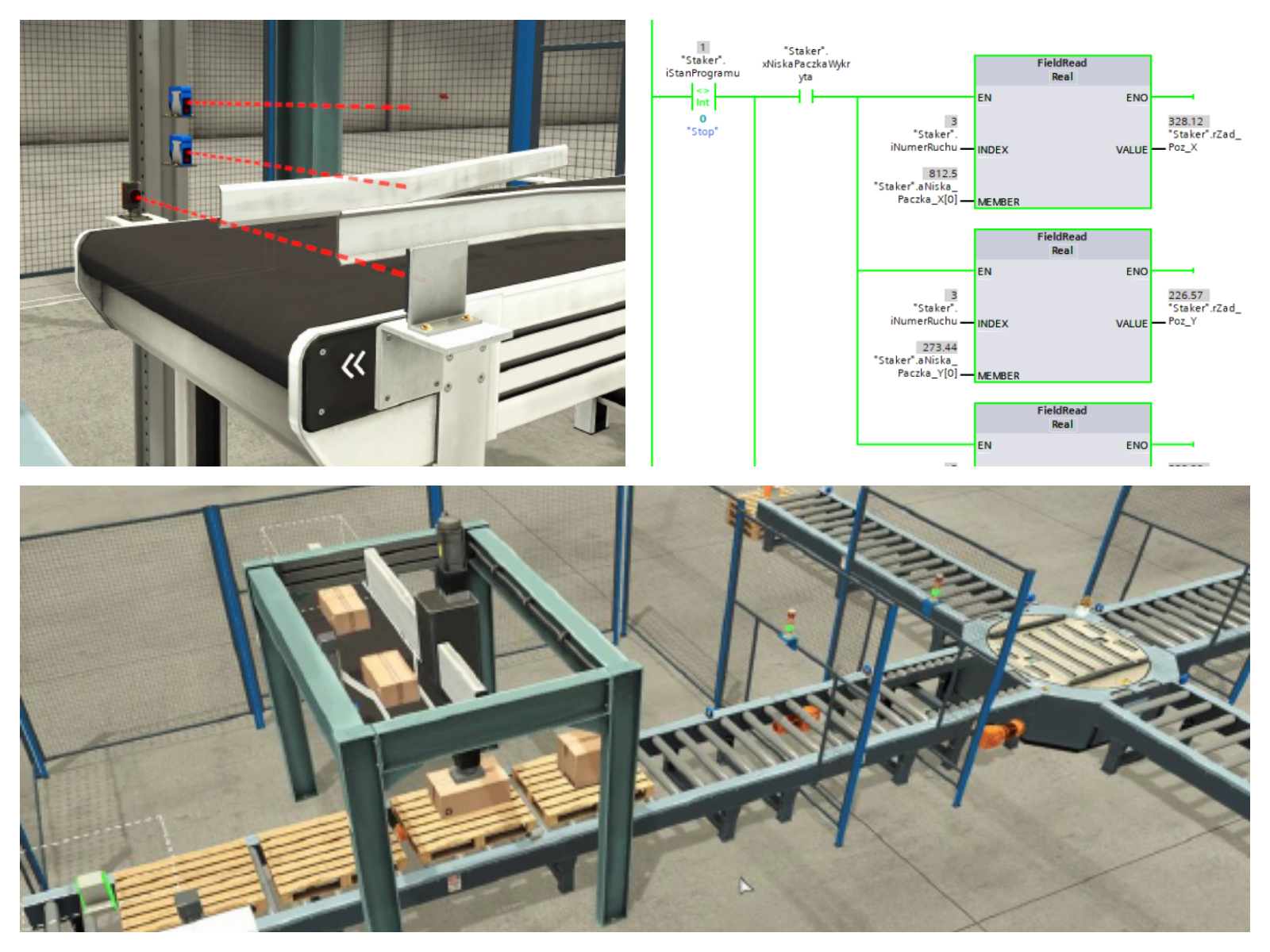
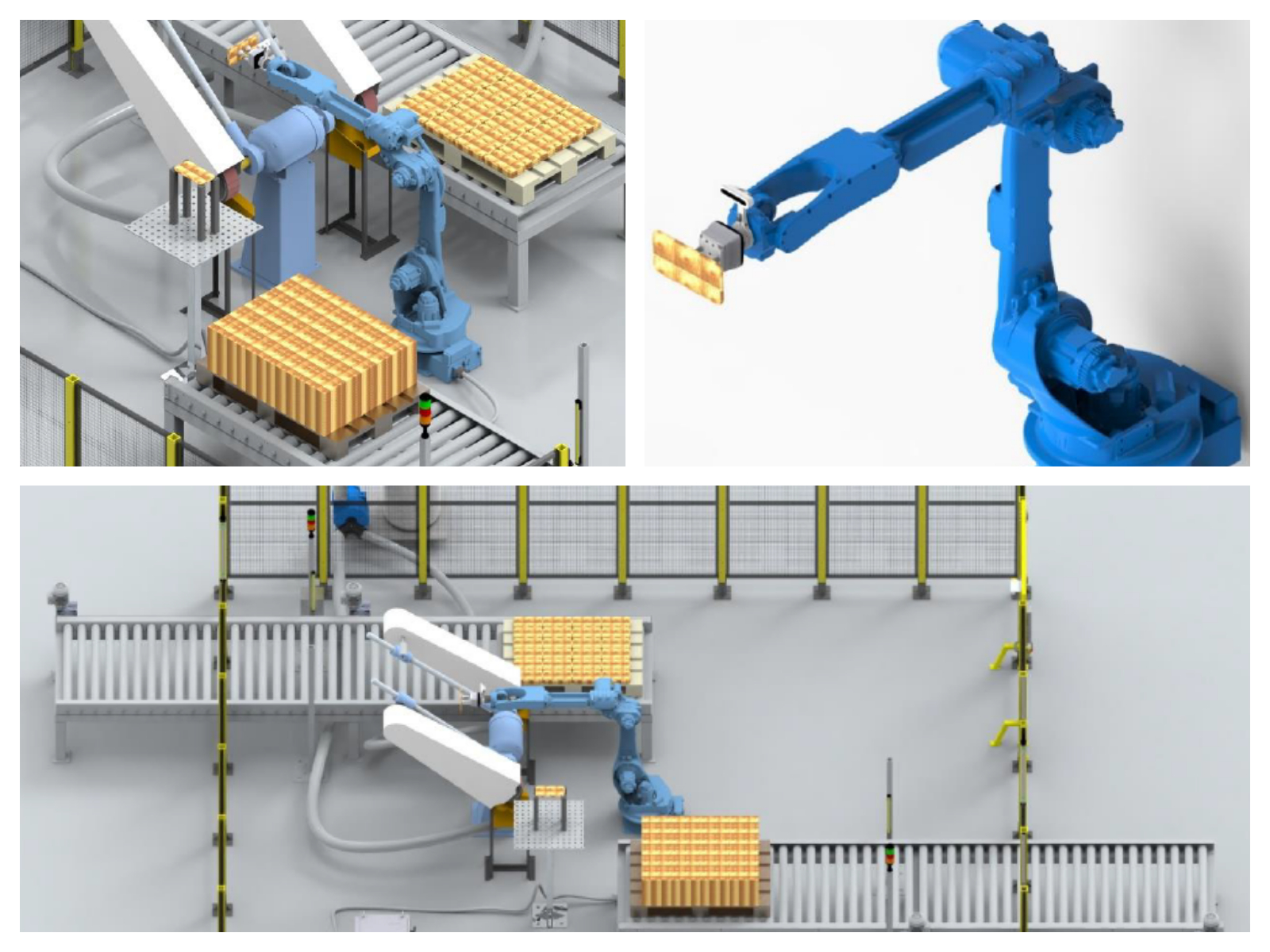
Tytuł projektu: „Sterowanie zautomatyzowaną linią paletyzacji opakowań zbiorczych oraz sortowania palet”.
Cel: Celem projektu było zaproponowanie sterowania dla zautomatyzowanej linii paletyzacji opakowań w oparciu o manipulator portalowy 3D oraz sortowania palet wraz z wizualizacją HMI dla operatora.
Autor projektu: Filip Szewczyk
Tytuł projektu: „Projekt stanowiska zrobotyzowanego do obróbki elementów drewnianych”.
Cel: Celem projektu było opracowanie zrobotyzowanego stanowiska produkcyjnego dla przedsiębiorstwa z branży stolarskiej na którym realizowana będzie operacja szlifowania elementów drewnianych.
Autor projektu: Konrad Piechota
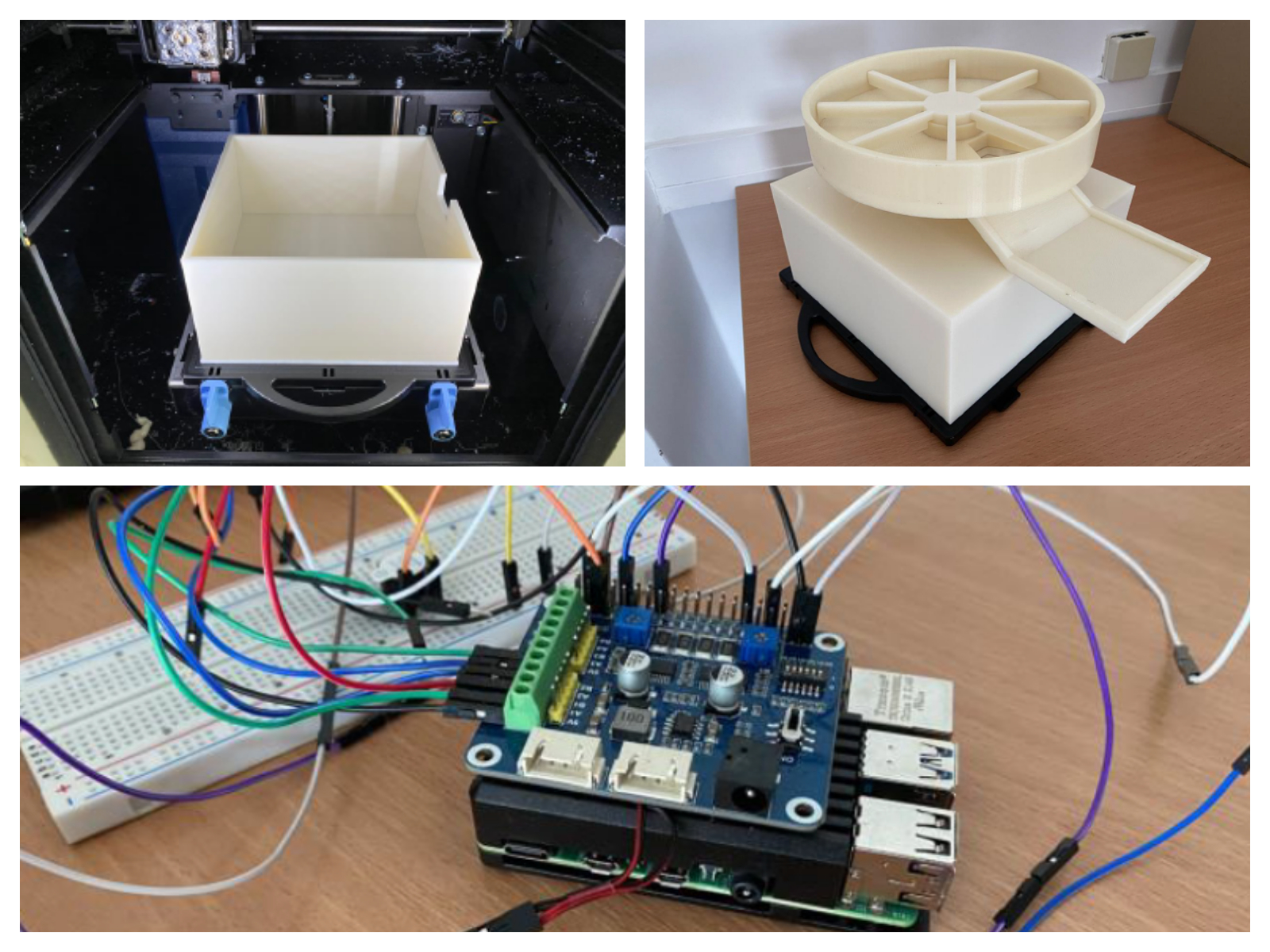
Tytuł projektu: „Opracowanie prototypu zautomatyzowanej kasetki na leki wyposażonej w moduły komunikacyjne”.
Cel: Celem projektu było opracowanie prototypu zautomatyzowanej kasetki na leki wyposażonej w moduły komunikacyjne. Zaprojektowanie oraz wykonanie fizycznego modelu kasetki pozwoliło na realizację badań nad wybranymi aspektami zaproponowanego rozwiązania, które obejmowały: ocenę zaproponowanych rozwiązań konstrukcyjnych, ocenę skuteczności opracowanych algorytmów sterowania, ocenę ogólnej funkcjonalności urządzenia.
Zespół projektowy: Marcin Górski, Michał Guba, Bartosz Baran, Mateusz Wojciechowski, Bartosz Łabendowicz
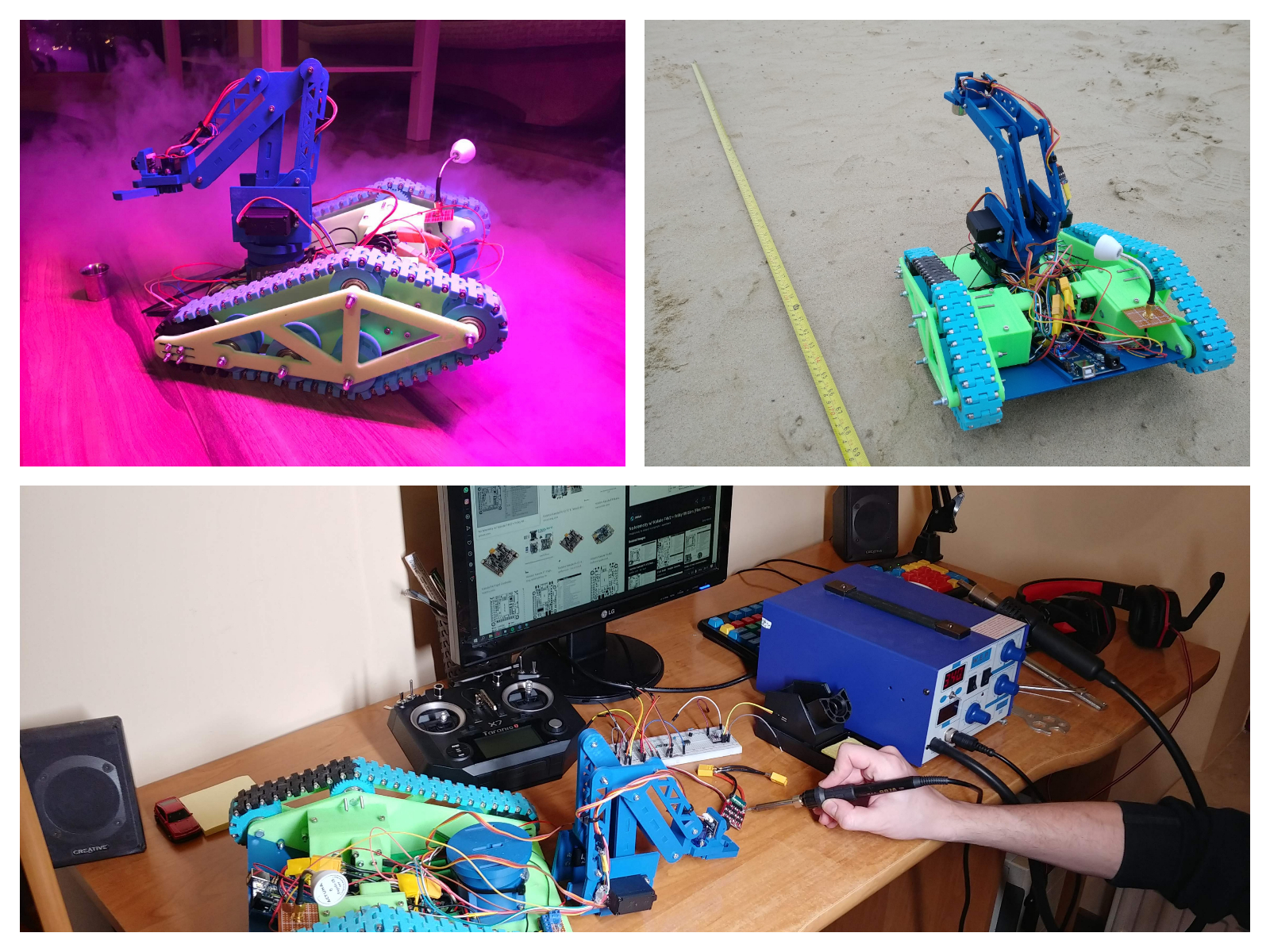
Tytuł projektu: „Opracowanie prototypu robota z napędem gąsienicowym wyposażonego w manipulator w postaci ramienia
z chwytakiem”.
Cel: Celem projektu było opracowanie prototypu robota z napędem gąsienicowym, który wyposażony jest w odpowiedni manipulator (ramię z chwytakiem). Zaprojektowanie oraz wykonanie fizycznego modelu robota umożliwiło realizację badań nad wybranymi własnościami opracowanej konstrukcji - własnościami wytrzymałościowymi elementów składowych, efektywnością algorytmów sterowania oraz własnościami jezdnymi opracowanego prototypu.
Zespół projektowy: Wiktor Stanek, Michał Świeca

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego, Program Operacyjny Wiedza Edukacja Rozwój 2014-2020 "PL2022 - Zintegrowany Program Rozwoju Politechniki Lubelskiej" POWR.03.05.00-00-Z036/17